Learning Notes
2018年10月21日 星期日
Quad tree path finding (3)
路徑修剪
Quad tree path finding (2)
黃色是Outer Node
紅色是Inner Node
檢查兄弟節點間是不是可以建立連通
(黃色和黃色才可以相連)
Quad tree path finding (1)
使用quad tree 產生尋路資料
如果黃色小格有和綠色矩形相交
或是黃色小格裡有綠色矩形就把黃色小格1分為4
黃色小格是可走區域,紅色小格不能走
建立小格之間的連通
圖ConnectHelper
粉紅色垂直方向上的連通,水籃色是水平方條的連通
2018年10月14日 星期日
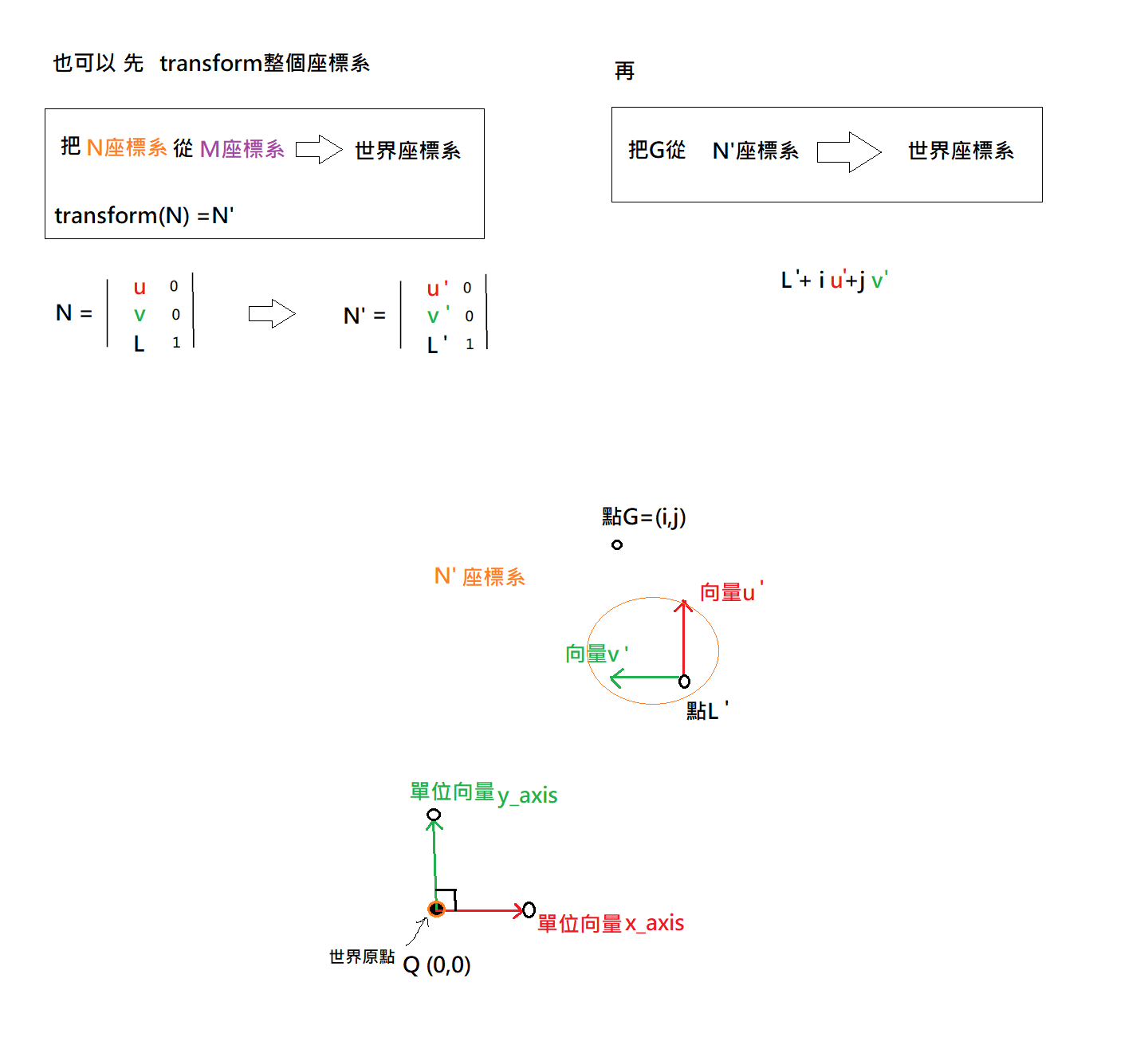
世界World、點Point、向量Vector
P = Q + aX + bY
以世界為基準,定義座標系M
進行座標變換
矩陣連鎖
local to world
world to local
較新的文章
較舊的文章
首頁
訂閱:
文章 (Atom)